#include <Matrix.hpp>
Public Types | |
| using | Scalar = _Scalar |
| using | Self = Matrix< Scalar, Rows, Cols > |
| using | Base = Eigen::Matrix< Scalar, Rows, Cols > |
Public Member Functions | |
| template<typename Z = bool> | |
| enable_if_t< Self::is_vector, Z > | areEqualEigenvaluesAs (const Matrix< Scalar, Dynamic, 1 > &other, double tolerance=1.0e-12) const |
| template<typename Z = bool> | |
| enable_if_t< Self::is_vector, Z > | isEqualEigenvectorAs (const Matrix< Scalar, Dynamic, 1 > &other, double tolerance=1.0e-12) const |
| template<typename Z = bool> | |
| enable_if_t< Self::is_matrix, Z > | hasEqualSetsOfEigenvectorsAs (const Matrix< Scalar, Dynamic, Dynamic > &other, double tolerance=1.0e-12) const |
| template<typename Z = Scalar> | |
| enable_if_t< Self::is_vector &&(Rows==3), Z > | operator() (const CartesianDirection direction) const |
| template<typename Z = Scalar&> | |
| enable_if_t< Self::is_vector &&(Rows==3), Z > | operator() (const CartesianDirection direction) |
| template<typename Z = Self> | |
| enable_if_t< Self::is_matrix, Z > | calculateMinor (size_t i, size_t j) const |
| const Base & | Eigen () const |
| Base & | Eigen () |
| const bool | isPositiveSemiDefinite (const double threshold=-1.0e-5) const |
| template<typename Z = Matrix<Scalar, Rows, 1>> | |
| enable_if_t< Self::is_matrix, Z > | pairWiseReduced (const size_t start_i=0, size_t start_j=0) const |
| template<typename Z = void> | |
| enable_if_t< Self::is_matrix, Z > | print (std::ostream &output_stream=std::cout) const |
| void | removeColumn (const size_t i) |
| void | removeColumns (const std::vector< size_t > &column_indices) |
| void | removeRow (const size_t i) |
| void | removeRows (const std::vector< size_t > &row_indices) |
Static Public Member Functions | |
| template<typename Z = Self> | |
| static enable_if_t<(Cols==Dynamic) &&(Rows==Dynamic), Z > | FromColumnMajorVector (const Matrix< Scalar, Dynamic, 1 > &v, const size_t rows, const size_t cols) |
| template<typename Z = Self> | |
| static enable_if_t< Self::is_vector, Z > | FromFile (const std::string &filename, size_t rows) |
| template<typename Z = Self> | |
| static enable_if_t< Self::is_matrix, Z > | FromFile (const std::string &filename, size_t rows, size_t cols) |
| template<typename Z = Self> | |
| static enable_if_t<(Cols==Dynamic) &&(Rows==Dynamic), Z > | FromRowMajorVector (const Matrix< Scalar, Dynamic, 1 > &v, const size_t rows, const size_t cols) |
Static Public Attributes | |
| static constexpr auto | Rows = _Rows |
| static constexpr auto | Cols = _Cols |
Detailed Description
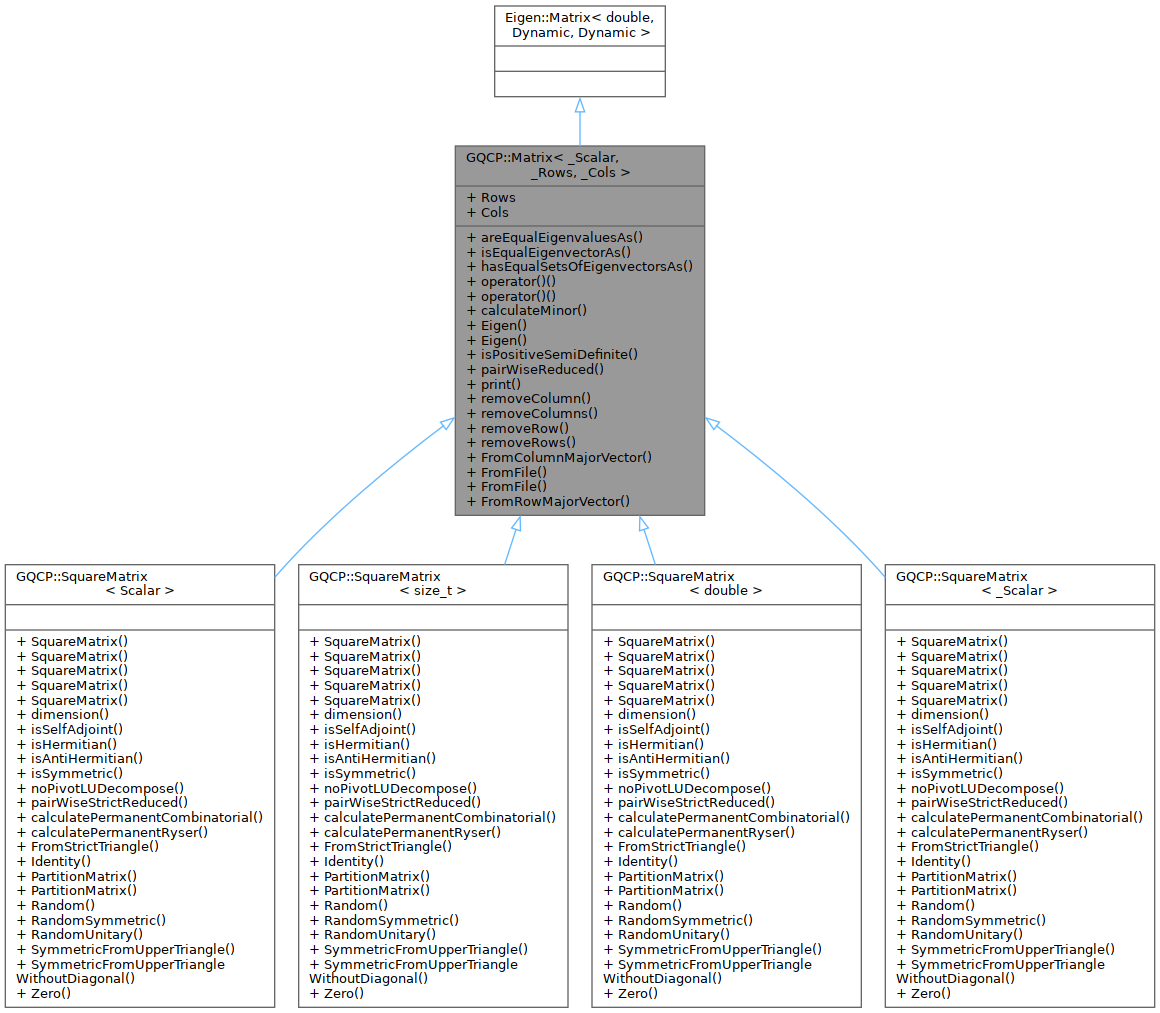
class GQCP::Matrix< _Scalar, _Rows, _Cols >
An extension of the Eigen::Matrix class, with extra operations
- Template Parameters
-
_Scalar the scalar representation type _Rows the number of rows (int or Dynamic) _Cols the number of columns (int or Dynamic)
We have decided to inherit from Eigen::Matrix, because we will use different hierarchies: see also: https://eigen.tuxfamily.org/dox-devel/TopicCustomizing_InheritingMatrix.html
Member Typedef Documentation
◆ Base
| using GQCP::Matrix< _Scalar, _Rows, _Cols >::Base = Eigen::Matrix<Scalar, Rows, Cols> |
◆ Scalar
| using GQCP::Matrix< _Scalar, _Rows, _Cols >::Scalar = _Scalar |
◆ Self
| using GQCP::Matrix< _Scalar, _Rows, _Cols >::Self = Matrix<Scalar, Rows, Cols> |
Member Function Documentation
◆ areEqualEigenvaluesAs()
|
inline |
Check if two sets of eigenvalues are equal within a given tolerance.
- Parameters
-
eigenvalues1 The first set of eigenvalues. eigenvalues2 The second set of eigenvalues. tolerance The tolerance for comparison.
- Returns
- If two sets of eigenvalues are equal within a given tolerance.
◆ calculateMinor()
|
inline |
- Parameters
-
i row index (starting from 0) j column index (starting from 0)
- Returns
- the i-j minor (i.e. delete the i-th row and j-th column)
◆ Eigen() [1/2]
|
inline |
- Returns
- This as a non-const Eigen base.
◆ Eigen() [2/2]
|
inline |
- Returns
- This as a const Eigen base.
◆ FromColumnMajorVector()
|
inlinestatic |
Convert a given column-major vector to a matrix with the given number of rows
- Parameters
-
v a vector that is supposed to be in a column-major ordering rows the number of rows the resulting matrix should have cols the number of columns the resulting matrix should have
◆ FromFile() [1/2]
|
inlinestatic |
Construct a vector by reading in a file
- Parameters
-
filename the name of the file to be read in rows the number of expected rows
◆ FromFile() [2/2]
|
inlinestatic |
Construct a matrix by reading in a file
- Parameters
-
filename the name of the file to be read in rows the number of expected rows cols the number of expected columns
◆ FromRowMajorVector()
|
inlinestatic |
Convert a given row-major vector to a matrix with the given number of rows
- Parameters
-
v a vector that is supposed to be in a column-major ordering rows the number of rows the resulting matrix should have cols the number of columns the resulting matrix should have
◆ hasEqualSetsOfEigenvectorsAs()
|
inline |
Check if two sets of eigenvectors are equal within a given tolerance.
- Parameters
-
eigenvectors1 The first set of eigenvectors. eigenvectors2 The second set of eigenvectors. tolerance The tolerance for comparison.
- Returns
- If two sets of eigenvectors are equal within a given tolerance.
◆ isEqualEigenvectorAs()
|
inline |
Check if two eigenvectors are equal, within a given tolerance.
- Parameters
-
eigenvector1 The first eigenvector. eigenvector2 The second eigenvector. tolerance The tolerance for comparison.
- Returns
- If two eigenvectors are equal.
◆ isPositiveSemiDefinite()
|
inline |
- Parameters
-
threshold The threshold on which the lowest eigenvalue is judged.
- Returns
- a boolean that states whether or not the matrix is positive semi-definite, i.e. has no strictly negative eigenvalues.
◆ operator()() [1/2]
|
inline |
- Parameters
-
direction the Cartesian direction (x, y, or z)
- Returns
- a modifiable value in the vector that corresponds to the given direction
◆ operator()() [2/2]
|
inline |
- Parameters
-
direction the Cartesian direction (x, y, or z)
- Returns
- the value in the vector that corresponds to the given direction
◆ pairWiseReduced()
|
inline |
- Parameters
-
start_i the index at which the rows should start start_j the index at which the columns should start
- Returns
- this matrix as a vector in a column-major storage, i.e. a pair-wise reduced form of this matrix. The elements of the matrix are put into the vector such that v(m) = M(i,j)
in which m is calculated from i and j in a column-major way
◆ print()
|
inline |
Print the contents of a this to an output filestream
- Parameters
-
output_stream the stream used for outputting
◆ removeColumn()
|
inline |
Remove the i-th column of this matrix.
- Parameters
-
i the index of the column that should be removed
- Note
- Implementation adapted from (https://stackoverflow.com/a/46303314), while waiting for Eigen's 3.4 release.
◆ removeColumns()
|
inline |
Remove the columns at the given indices.
- Parameters
-
column_indices the indices of the columns that should be removed, in ascending order
◆ removeRow()
|
inline |
Remove the i-th row of this matrix.
- Parameters
-
i the index of the row that should be removed
- Note
- Implementation adapted from (https://stackoverflow.com/a/46303314), while waiting for Eigen's 3.4 release.
◆ removeRows()
|
inline |
Remove the rows at the given indices.
- Parameters
-
row_indices the indices of the columns that should be removed, in ascending order
Member Data Documentation
◆ Cols
|
staticconstexpr |
◆ Rows
|
staticconstexpr |
The documentation for this class was generated from the following file:
- /__w/GQCP/GQCP/gqcp/include/Mathematical/Representation/Matrix.hpp