#include <SimpleTransformation.hpp>
Public Types | |
| using | Scalar = _Scalar |
| using | DerivedTransformation = _DerivedTransformation |
| using | Self = SimpleTransformation< Scalar, DerivedTransformation > |
| using | JacobiRotationType = JacobiRotation |
| using | OrbitalRotationGeneratorType = typename OrbitalRotationGeneratorTraits< DerivedTransformation >::OrbitalRotationGenerators |
 Public Types inherited from GQCP::BasisTransformable< _DerivedTransformation > Public Types inherited from GQCP::BasisTransformable< _DerivedTransformation > | |
| using | Transformation = typename BasisTransformableTraits< _DerivedTransformation >::Transformation |
| Public Types inherited from GQCP::JacobiRotatable< _DerivedTransformation > | |
| using | JacobiRotationType = typename JacobiRotatableTraits< _DerivedTransformation >::JacobiRotationType |
Public Member Functions | |
| SimpleTransformation (const SquareMatrix< Scalar > &T) | |
| SimpleTransformation (const OrbitalRotationGeneratorType &kappa) | |
| size_t | numberOfOrbitals () const |
| size_t | dimension () const |
| const SquareMatrix< Scalar > & | matrix () const |
| DerivedTransformation | adjoint () const |
| DerivedTransformation | inverse () const |
| bool | isUnitary (const double threshold=1.0e-12) const |
| DerivedTransformation | transformed (const DerivedTransformation &T) const override |
| DerivedTransformation | rotated (const JacobiRotationType &jacobi_rotation) const override |
| Public Member Functions inherited from GQCP::BasisTransformable< _DerivedTransformation > | |
| virtual _DerivedTransformation | transformed (const Transformation &T) const=0 |
| virtual void | transform (const Transformation &T) |
| virtual _DerivedTransformation | rotated (const Transformation &U) const |
| void | rotate (const Transformation &U) |
| Public Member Functions inherited from GQCP::JacobiRotatable< _DerivedTransformation > | |
| virtual _DerivedTransformation | rotated (const JacobiRotationType &jacobi_rotation) const=0 |
| void | rotate (const JacobiRotationType &jacobi_rotation) |
Static Public Member Functions | |
| static DerivedTransformation | FromJacobi (const JacobiRotation &jacobi_rotation, const size_t dim) |
| static DerivedTransformation | Identity (const size_t dim) |
| static DerivedTransformation | Random (const size_t dim) |
| static DerivedTransformation | RandomUnitary (const size_t dim) |
| static DerivedTransformation | Zero (const size_t dim) |
Protected Attributes | |
| SquareMatrix< Scalar > | T |
Detailed Description
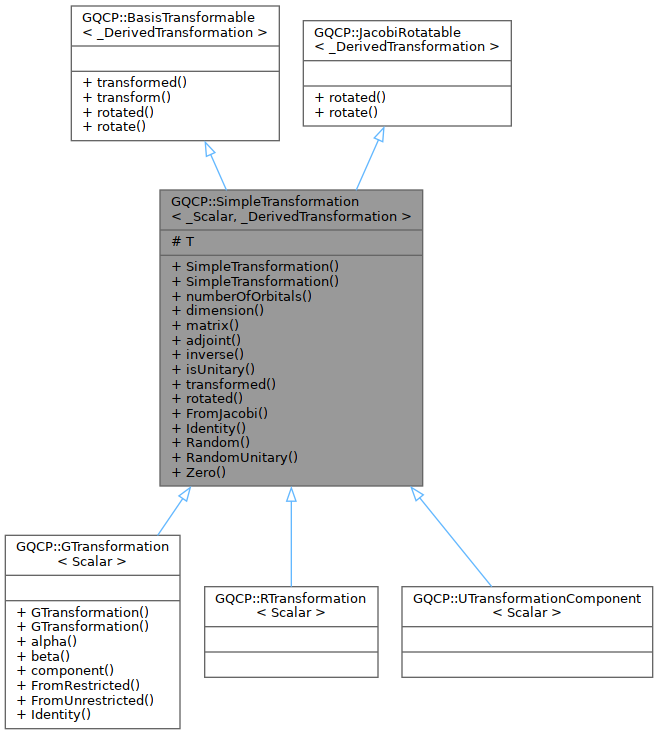
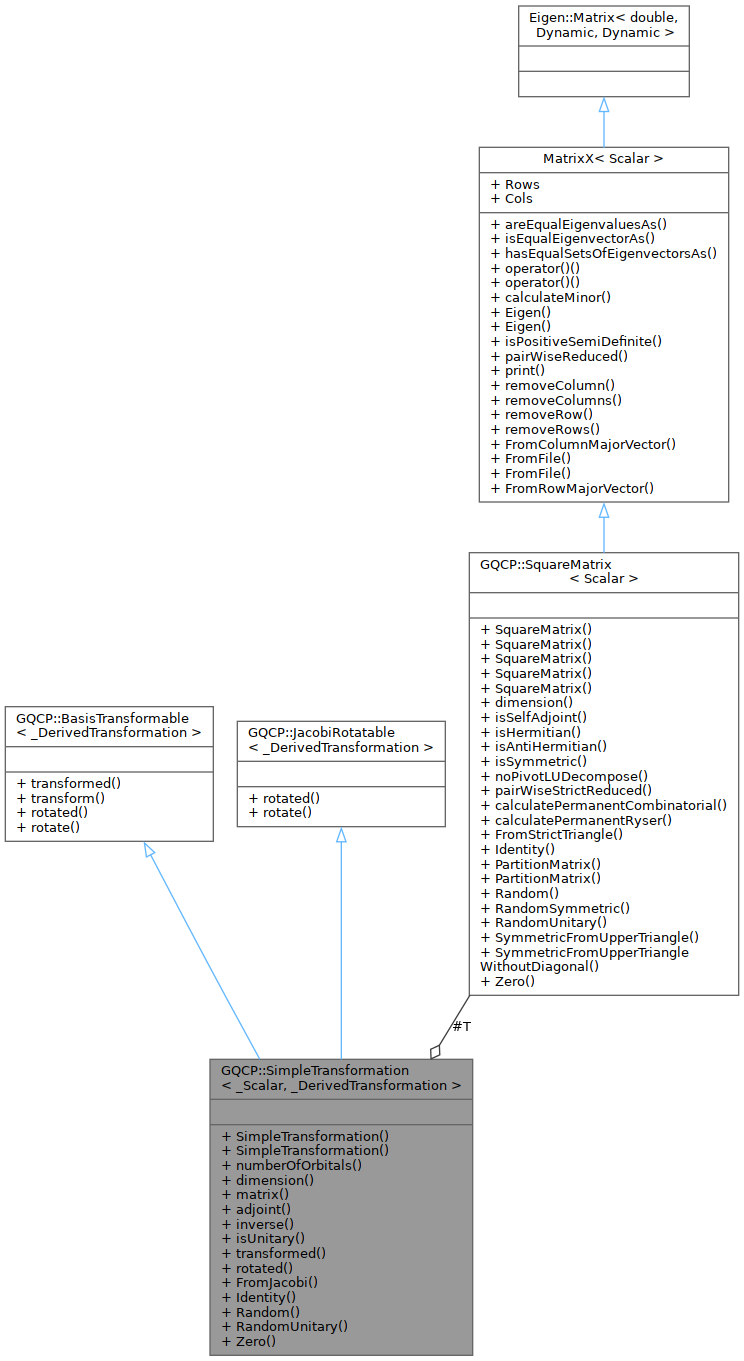
class GQCP::SimpleTransformation< _Scalar, _DerivedTransformation >
A basis transformation that can be represented by a single transformation matrix.
In general, we adopt the convention outlined in (https://gqcg-res.github.io/knowdes/spinor-transformations.html), where the new orbitals' coefficients can be found in the respective column of the related transformation matrix.
This class is used as a base class for RTransformation and GTransformation, since they are both expressed using a single matrix, as opposed to UTransformation, which uses separate transformation coefficients for alpha- and beta- matrices. The word 'simple' is used here as an antonym for 'compound'.
- Template Parameters
-
_Scalar The scalar type used for a transformation coefficient: real or complex. _DerivedTransformation The type of the transformation matrix that derives from this class, enabling CRTP and compile-time polymorphism.
Member Typedef Documentation
◆ DerivedTransformation
| using GQCP::SimpleTransformation< _Scalar, _DerivedTransformation >::DerivedTransformation = _DerivedTransformation |
◆ JacobiRotationType
| using GQCP::SimpleTransformation< _Scalar, _DerivedTransformation >::JacobiRotationType = JacobiRotation |
◆ OrbitalRotationGeneratorType
| using GQCP::SimpleTransformation< _Scalar, _DerivedTransformation >::OrbitalRotationGeneratorType = typename OrbitalRotationGeneratorTraits<DerivedTransformation>::OrbitalRotationGenerators |
◆ Scalar
| using GQCP::SimpleTransformation< _Scalar, _DerivedTransformation >::Scalar = _Scalar |
◆ Self
| using GQCP::SimpleTransformation< _Scalar, _DerivedTransformation >::Self = SimpleTransformation<Scalar, DerivedTransformation> |
Constructor & Destructor Documentation
◆ SimpleTransformation() [1/2]
|
inline |
Construct a SimpleTransformation from the transformation matrix that it encapsulates.
- Parameters
-
T The transformation matrix that collects the expansion coefficients of the new basis (vectors) in the old basis as columns.
◆ SimpleTransformation() [2/2]
|
inline |
Construct a SimpleTransformation from a set of orbital rotation generators.
- Parameters
-
kappa The orbital rotation generators from which a transformation so-called kappa matrixis constructed.
Member Function Documentation
◆ adjoint()
|
inline |
- Returns
- The adjoint transformation of this one.
◆ dimension()
|
inline |
- Returns
- The dimension of this basis transformation.
◆ FromJacobi()
|
inlinestatic |
Create a general transformation from Jacobi rotation. Note that we work with the (cos, sin, -sin, cos) definition.
- Parameters
-
jacobi_rotation The Jacobi rotation. dim The dimension of the resulting matrix.
- Returns
- The general transformation that corresponds to the given Jacobi rotation.
◆ Identity()
|
inlinestatic |
Create an identity transformation between two orbital bases.
- Parameters
-
dim The dimension of the transformation matrix.
◆ inverse()
|
inline |
- Returns
- The inverse transformation of this one.
◆ isUnitary()
|
inline |
Check if this transformation is unitary.
- Parameters
-
threshold The threshold used to check for unitarity.
- Returns
- If this transformation is unitary, within the given threshold.
◆ matrix()
|
inline |
- Returns
- The transformation matrix that collects the expansion coefficients of the new basis (vectors) in the old basis as columns.
◆ numberOfOrbitals()
|
inline |
- Returns
- The number of orbitals (spinors, spin-orbitals or spatial orbitals, depending on the context/derived class) this transformation is related to.
◆ Random()
|
inlinestatic |
Create a random transformation.
- Parameters
-
dim The dimension of the transformation matrix.
◆ RandomUnitary()
|
inlinestatic |
Create a random unitary transformation.
- Parameters
-
dim The dimension of the transformation matrix.
◆ rotated()
|
inlineoverride |
Apply the Jacobi rotation and return the result.
- Parameters
-
jacobi_rotation The Jacobi rotation.
- Returns
- The transformation that encapsulates the sequential application of this transformation, followed by the Jacobi rotation.
◆ transformed()
|
inlineoverride |
Apply the basis transformation and return the result, which corresponds to the concatenation of two basis transformations.
- Parameters
-
T The basis transformation.
- Returns
- The transformation that encapsulates the sequential application of this transformation, followed by the given transformation.
◆ Zero()
|
inlinestatic |
Create a zero transformation.
- Parameters
-
dim The dimension of the transformation matrix.
Member Data Documentation
◆ T
|
protected |
The documentation for this class was generated from the following file:
- /__w/GQCP/GQCP/gqcp/include/Basis/Transformations/SimpleTransformation.hpp